


Team Hector an der Technischen Universität (TU) Darmstadt
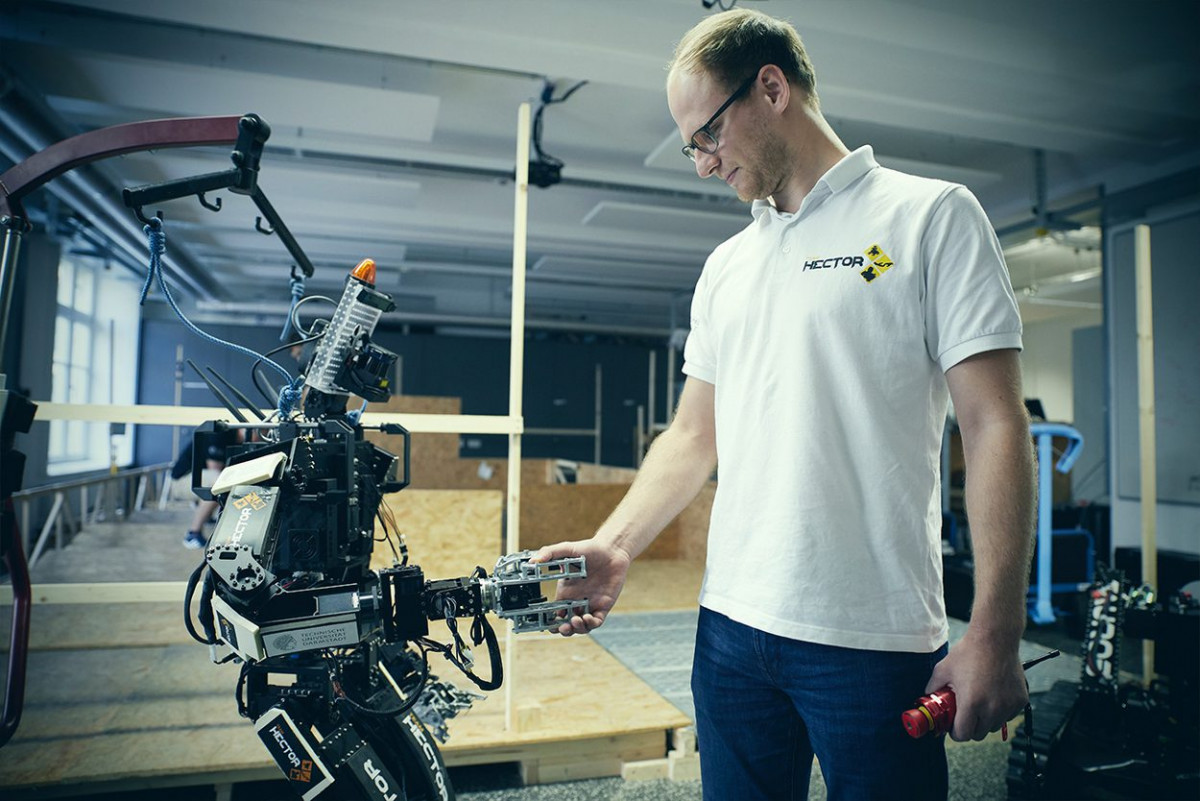
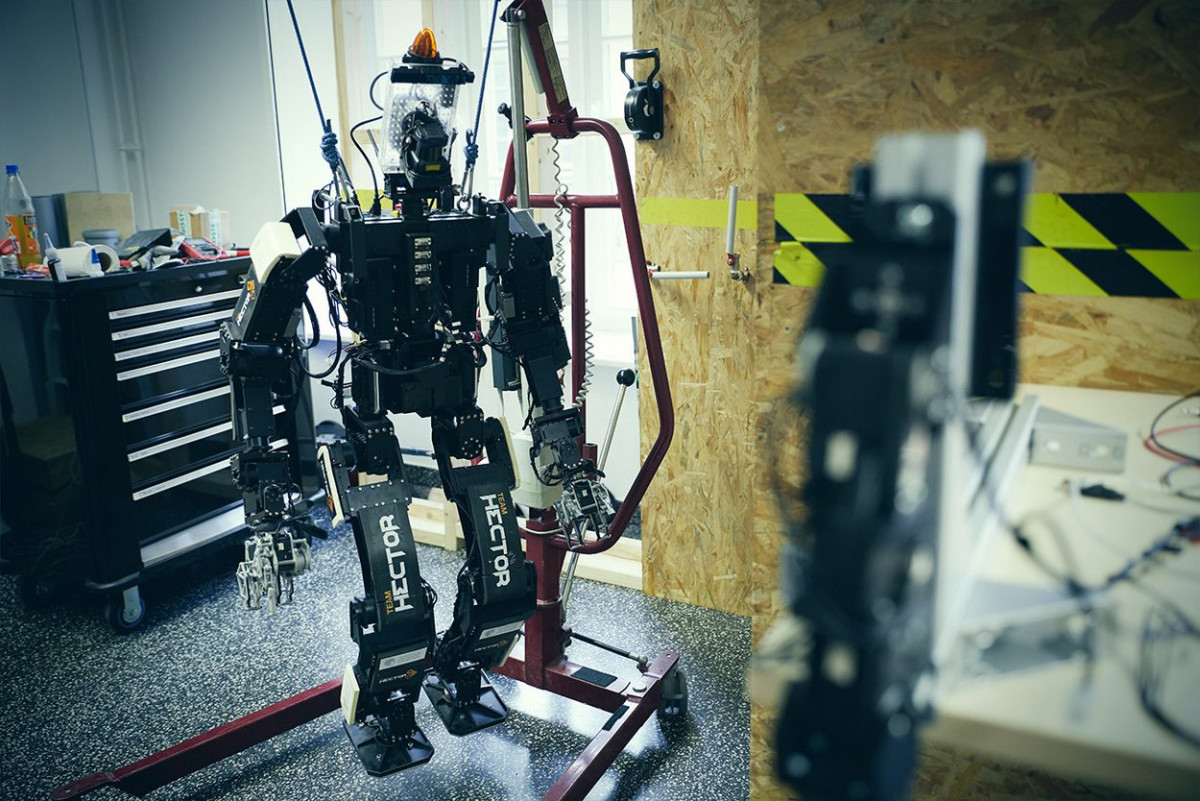
Doch der ‚Hector Tracker‘ ist nicht das einzige „metallische Pferd“, auf das die Darmstädter setzen: In der Ecke steht noch ein zweiter Roboter. Beziehungsweise hängt. Johnny 5 wird aktuell noch gesichert. Denn im Gegensatz zum ‚Hector Tracker‘ ist Johnny 5 ein menschenähnlicher Roboter, seine Bewegungen auf zwei Beinen noch sehr staksig. Sprinten wie in Terminator 2 – das geht im wahren Leben noch nicht. Aber seine Beine und Arme kann der 1,50 Meter große und gut 50 Kilogramm schwere Roboter sehr wohl einsetzen. Dafür sorgen insgesamt knapp 40 Motoren, die neben unzähligen Drähten und Kabeln im Metallkörper untergebracht sind. Dazu hat er Laserscanner als Augen und eine Webcam. So kann er wie der Tracker eine 3D-Karte seiner Umgebung erstellen. „Prinzipiell ist ein humanoiderRotober die idealere Maschine“, erklärt Alexander Stumpf. Denn schließlich baut der Mensch Gebäude und Industrieanlagen für seine Bedürfnisse. Bei einem Wettbewerb fuhr Johnny 5 in einem Auto zu einer Industrieanlage, musste aussteigen und sich den Weg zu einem Korridor frei räumen. Schließlich sollte er mit einer Bohrmaschine Löcher in die Wand bohren und ein Ventil schließen. Ganz autonom ist Johnny 5 dabei aber nicht: Es befindet sich hierbei immer ein Operator in sicherer Entfernung an einem Notebook, um dem Roboter im Zweifel Anweisungen geben zu können.
Sensibler Roboter
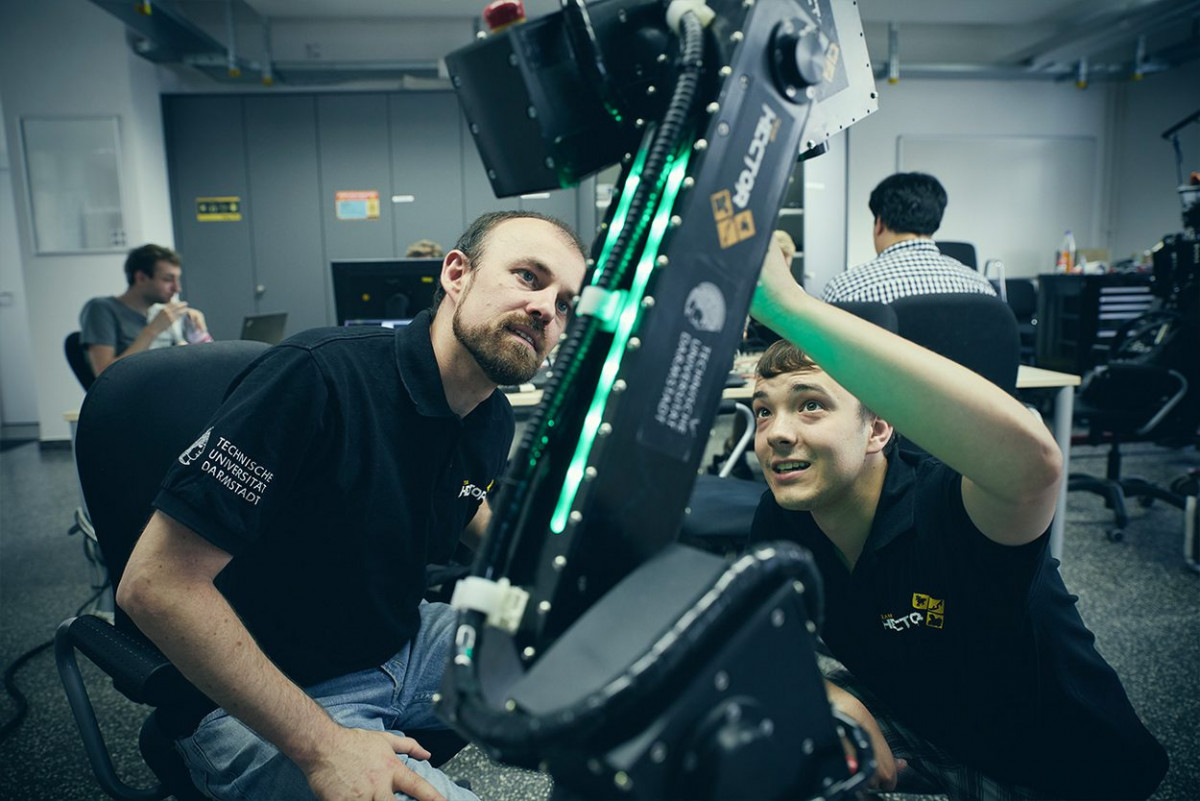
Doch vieles funktioniert schon recht gut. Das ist auch der Verdienst von Martin Oehler. Er ist seit 2015 im Team, hat hier seine Bachelorarbeit geschrieben und arbeitet mittlerweile als Wissenschaftliche Hilfskraft bei Hector. „Einige Semester sind für das Team sicher draufgegangen“, sagt er grinsend. Bereut hat er das nie: „Die Arbeit macht unheimlich viel Spaß und man kann hier sein ganzes Wissen praktisch anwenden“, strahlt er. Das Faszinierende ist, dass man direkt am Roboter sehen kann, wie die Software funktioniert“, sagt er und demonstriert es an Johnnys Greifhand. Ganz sensibel reagiert sie auf seinen Druck, steuert die Kraft mit einer Federung gekonnt aus. Martin nickt zufrieden. Hier kann er die Erkenntnisse aus dem Masterstudium in den Bereichen Robot Learning und Machine Learning bestens einbringen. Martin würde gerne auch nach seinem Abschluss für das Team Hector arbeiten und seine Doktorarbeit hier schreiben. Andere Teilnehmer wollen später eher in die Industrie: „Wir arbeiten hier in einem hochaktuellen Forschungsfeld in einem internationalen Umfeld“, sagt Teamleiter Stefan Kohlbrecher. „Den Studierenden gibt das nicht nur die Möglichkeit, viel zu lernen und ihr Wissen direkt anzuwenden, sondern sie haben später richtig gute Jobchancen, zum Beispiel in der Autoindustrie im Bereich Autonomes Fahren.“Doch erstmal gilt die ganze Aufmerksamkeit des Teams ihrem nächsten großen Ziel: Dem RoboCup in Japan.
Nachtrag: In der 'Rescue-League' beim RoboCup in Japan reichte es für das Team Hector nicht ganz für den angestrebten Titel im Bereich "Autonomie/Erkundung". Am Ende mussten sie sich - auch aufgrund von Hardware-Problemen - knapp dem Team Yildiz geschlagen geben. Dafür gewannen die Darmstädter den Micro Aerial Award". "Wir freuen uns sehr über den Award und bei der nächsten WM greifen wir wieder neu an", so Stefan Kohlbrecher. Immerhin: Das Team Yildiz arbeitet im größerem Umfang mit der Open Source-Software von Team Hector. "So haben wir auch ein wenig Anteil am Titel." Die Software gibt es kostenlos auf www.teamhector.de.




